Попал ко мне в руки круг 6152 от Fleischmann.

Собственно меня попросили модернизировать его, чтобы им можно было управлять из-под RocRail. Круг сам по себе достаточно известный, на форуме очень много о нём писалось. Лично мне понравилось как реализовано позиционирование круга. Почитав
инфу на сайте RocRail, а также известный многим
сайт Пако, я понял, что реализовать управление можно и делается это достаточно просто. Итак что же для этого понадобится?
Во-первых, цифровая командная станция, которая умеет работать с RocRail и имеет(желательно) ту или иную шину обратной связи. Если имеющаяся в наличии КС не имеет шины обратной связи, то эту шину придётся реализовывать отдельно, на другом "железе".
Во-вторых, аксессуарный декодер и переключающее реле на 12-16 вольт. Далее надо выбрать, что будет использоваться в качестве позиционных датчиков(я лично выбрал датчики Холла).
Начинаем разбирать круг. Для начала снимем подряд небольшую часть сегментов(штук 7-8), чтобы иметь возможность снять мост. Сегменты снимаются достаточно просто, надо нажать на защёлку и потянуть сегмент вверх(пока они новые, то вытаскиваются с трудом).

После этого снимаем накладку над осью моста

под которой будет фиксирующая разрезная шайба.

Извлекаем шайбу, снимаем мост с оси и откладываем его пока в сторону.
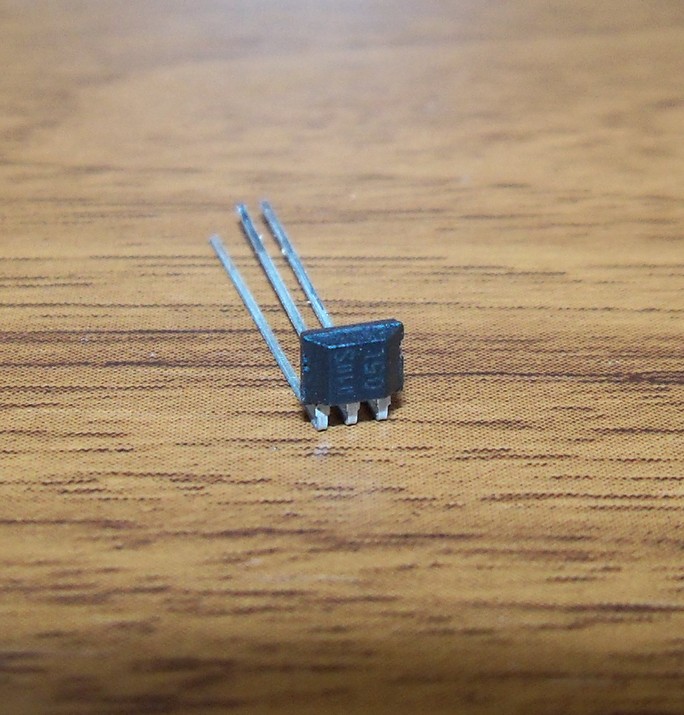
Внимательно осмотрев всё это хозяйство, я пришёл к выводу, что для датчиков положения, удобнее всего, подойдут датчики Холла, т.к. они занимают мало места и в конструкции круга не требуется больших изменений. Я применил датчики Холла
TLE4905. При использовании этих датчиков, надо учитывать, что эти они однополярные, т.е. срабатывают только от одного полюса магнита.
Для установки датчиков, я сделал два отверстия диаметром около 1 мм, под боковые выводы датчика.


Дальше сгибаем выводы датчика
и вставляем его выводы в отверстия сегмента.
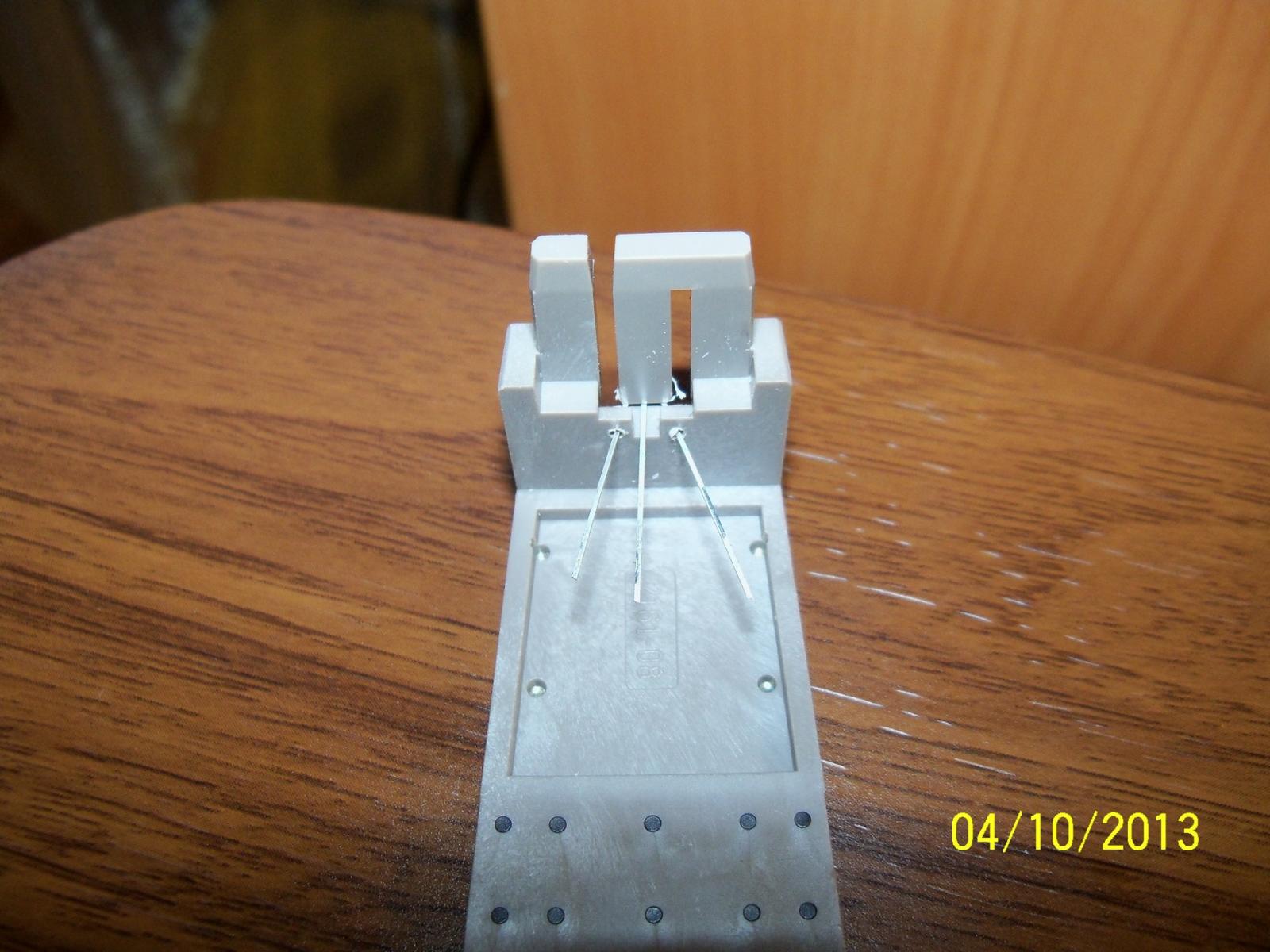
Фиксируем датчик при помощи суперклея, стараясь при этом расположить его точно по центру сегмента.

При подключении датчика применяется минимальная обвязка,
которую можно собрать на куске макетной платы, либо сделать плату самому по
ЛУТ технологии.
Припаиваем выводы датчиков к этим платам, а от плат пускаем провода для подключения к модулям обратной связи.

После того, как все необходимые сегменты оснащены датчиками, можно их установить на место.


Не устанавливаем только те 7-8 штук, которые снимались самыми первыми.
Пока все, продолжение следует...........